|
DISCOVERING THE TARANIS
|
|||
|
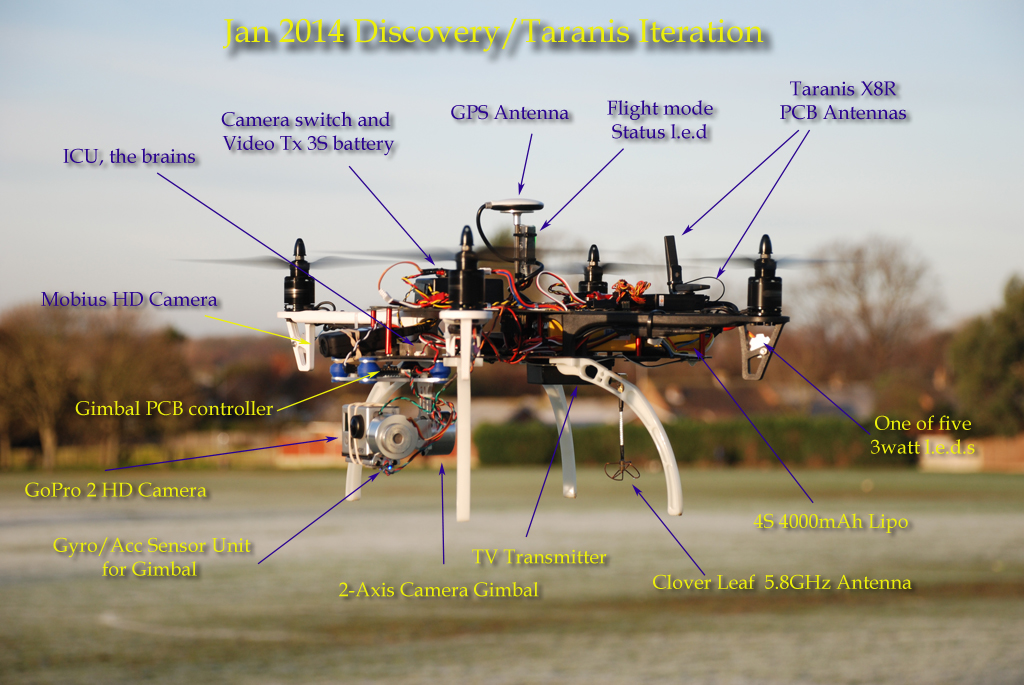
OPEN SESAME! My Discovery quadcopter is ever changing. I removed the Quanum telemetry 'fuel' meter which I mentioned on the previous page after it failed. It was good when it worked but for some reason it just stopped working. Something I did I expect. All is not lost, however, for the FRSKY Taranis came to the rescue.
|
|
||

Click above image for Video What is special about the Taranis apart from its price is that many people have this system and their own set-ups which are shared or uploaded to the Internet. The *Open source software (meaning anyone with the necessary skill can alter the actual program code) means that hundreds of clever geeks can offer solutions and enhancements to the program. Contrast that with a manufacturer that just relies on its own handful of it software people to develop their systems. While I've only had my Taranis a few weeks, and have only set up my Quadcopter on it, I feel satisfied with my progress so far having set up 12 mixers, 8 servo functions, 5 custom switches and 24 custom functions for this one model. I even learned how to create my own .wav files for use on the transmitter using the Windows recording function, a free text-to-speech programs called NaturalReader and Audacity. Click For example to hear the last sentence. |
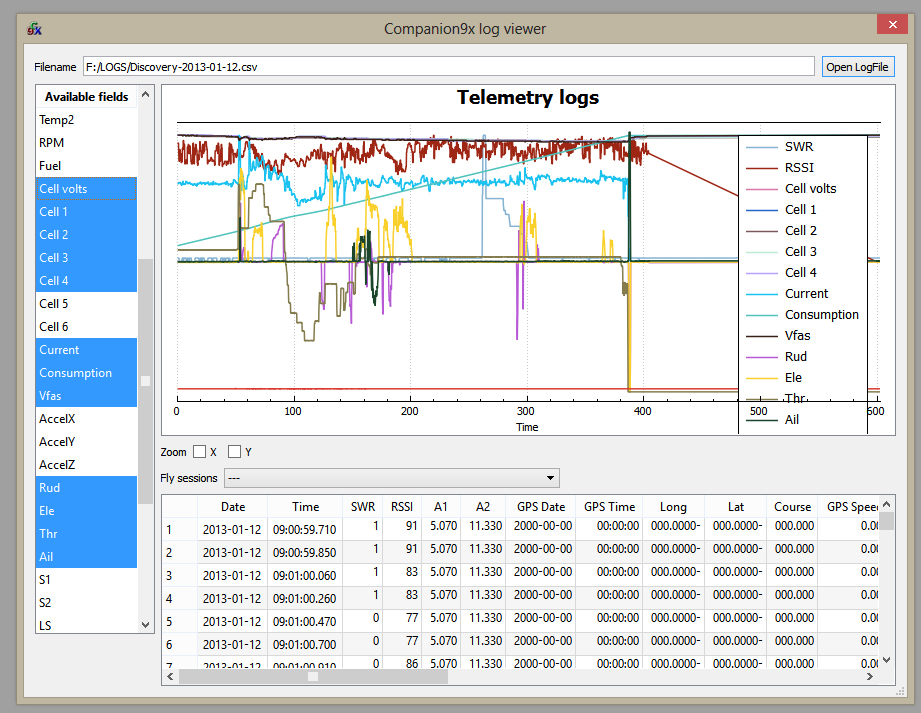
Click Tx for Sounds Video The programming of the Taranis can either be performed on the transmitter screen or using a piece of free PC software called Open Tx which simulates said transmitter from where you can 'flash' the firmware. It's not so easy to program, it must be said, but I managed it so perhaps you will be able to as well. Effectively, any switch or stick or slider an do anything and anything can be mixed with anything else. The beauty of the system are the custom switches and custom functions. The latter using Boolean algebra (i.e. this sort of thing: a~x, a<x, a>x: |a|<x, |a|>x, a<b, a>b,a=b, AND, OR, XOR, d>x, |d|>x, if you remember that from school). In other words for example, if this switch is up and that one is down and the value of the the parameter is more or less than so and so then this can happen or not happen.
|
||
|
SENSORY PERCEPTION...
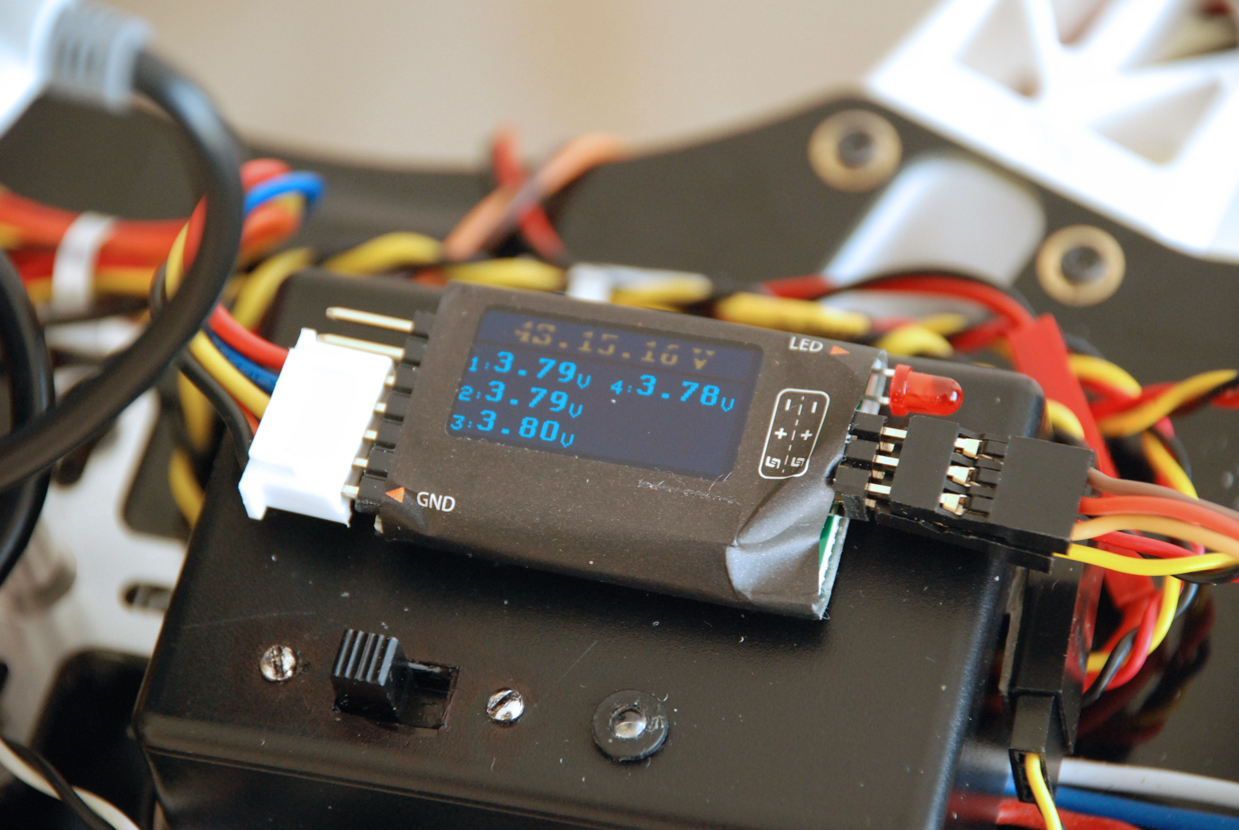
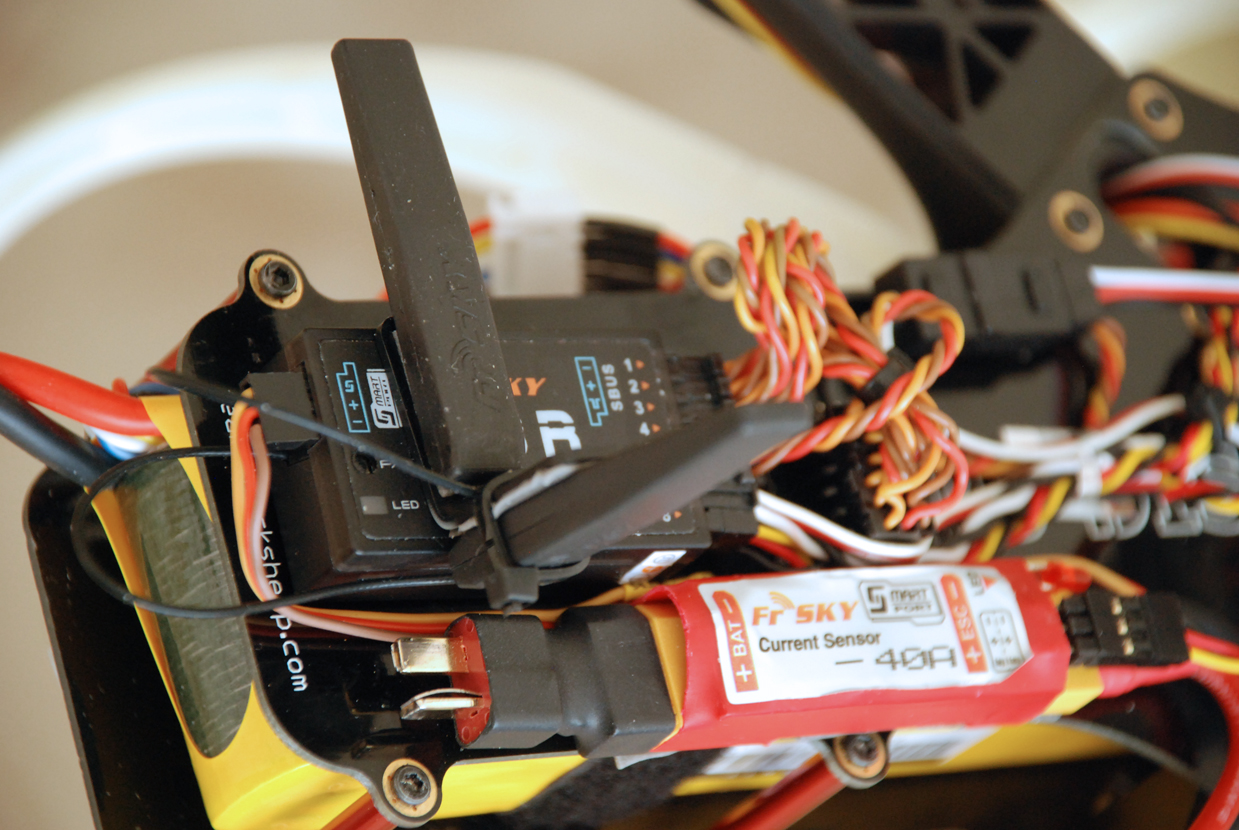
The Smart Port sensors can be daisy-chained so no hub is required and the thing is these two are cheap to buy, less than £15 each, and the latest receiver is only £24! Also on sale for the FPV enthusiast and/or glider flier is the GPS sensor, a Variometer and temperature sensor; all the telemetry data from these too can be recorded in the transmitter where it is saved as a spreadsheet file on the SDcard. |
|||
|
PICTURE THIS...
The Tx/Rx units generally come supplied with 'rubber ducky' type antennas and, while these are perfectly adequate or short range, my funny looking circularly polarized antennas offer a better signal, slightly more range and better multipath reception , I believe. This 4 'loop' aerial is called a skew planar antenna btw. There are tiny spiral directional and patch high gain antennas available too. While one can buy powerful 1 watt transmitters, this can be a false economy since doubling the power does NOT double the range, your money is better spent on good antennas. My few milliwatts certainly provide me with a range of 300+ metres; remembering my quad gets pretty small at greater distances and haven't dared to fly further away as yet even though I have a Return to Home/Failsafe function on my DJI Naza GPS unit enabled. No, I have not tried to fly using just the monitor or Fat Shark goggles yet. |
|||
|
So far
all of this piece has been about my quadcopter but everything I have
written here applies to fixed wing models as well. On the slope or flat
field a
Variometer comes into its own, you could create custom function that
only beeps when it climbs or falls more that a certain number of metres.
If you fly cross-country you might be interested in recording the GPS
coordinates throughout your flight to superimpose them on Google maps.
On the flat field or flying FPV you may want to know the exact state of
of your power supply or rpm or any parameter you can imagine. Affordable
microelectronics has come a long way, trouble is, keeping up with
everything is proving difficult sometimes. PS Since writing this piece back in January 2014, I have moved on to a new Flight controller called a Vector from Eagle Tree Systems which features a full OSD and I have also built a new quadcopter. Still using the Taranis though.
|
|||
|
RESOURCES |
|||
| Open Tx Program |
Click above pictures for larger images |
||
|
Updated: Sept 19th 2014 |
|||