|
BLACK OPS |
|
|
HELLO JELLO! The bane of any action videographer's life, one who uses a CMOS camera that is, is Jello. This is the undulating horizontal 'wobble' seen on videos where the camera is subject to vibration. With a quadcopter having four, six or even eight outrunners, unbalanced props and motor bell housings can cause severe vibration. One solution is to buy really good motors, the other is to mitigate the extent of the vibration with some form of dampening. Foam ear plugs, silicone caulking, Sorbothane, Moongel are among some of the things that work to some extent but really you need to balance your props AND your motors to get the best results. This next part is probably the most important thing you can do if you're planning to use your quadcopter as a camera platform... balance your motors (and props). To balance your motors you'll need a few things though.
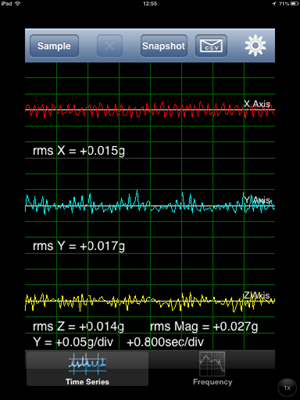
On the board, only mount the motor and lay the iPhone/Pad/Pod nearby. The white things are sticky pads to stop the iPad from sliding about. Inside these smart-devices there is a 3-axis accelerometer which measures X, Y & Z vibrations in g. On the right the App is called iSeismometer and it's free, the one on the left is called Vibration and costs £2.99. I prefer the second. The procedure is simple but time consuming. The idea on the second is to measure the rms Mag 'combined' value and get it as low as possible or get the visible waves as small in magnitude as possible. The other App is more for visual reference testing. It is time consuming but well worth the effort; it shouldn't take more than an hour or two. |
The balancing is done by adding pieces of sticky tape to
the bell of the outrunner until the readings are low. I managed to
get mine to 0.010 on three motors and 0.016 on the other. (Always
the way isn't it?) For a full excellent explanation of the method go
here: |
 GOODBYE
JELLO! GOODBYE
JELLO!Here (click tree) is another little video from my 'front garden' after motor balancing using the above method and the Vibration app. It's not perfect, I made the .wmv video hurriedly and the quality is not that great, but a lot of the Jello has gone. The cherry blossom in my garden is out now at the beginning of May 2013 so what more apt music score than 'Cherry Blossoms', a piece of traditional Sakura Koto Japanese twang music. |
|
|
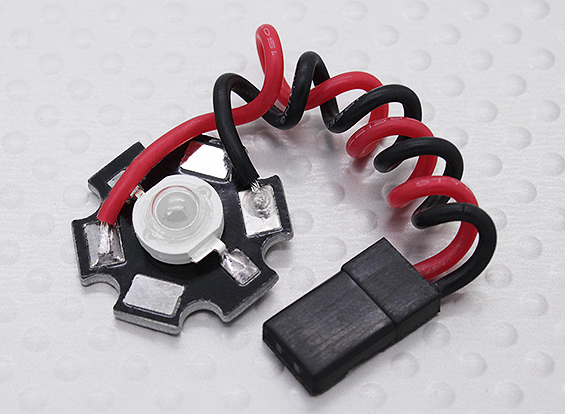
Most of the time, most quadcopter fliers fly relatively close to themselves and do not venture too far away. This is usually because of the nature of the filming they are doing or because they don't have FPV fitted to their machines. The biggest problem with quads is orientation since generally there is generally no discernable front and back from more than about 50 metres. One thing which is often done is to have different coloured motor arms or festoon the model with l.e.d. light strips. While these are really pretty indoors or at night, in the sunshine they are virtually useless. At HobbyKing.com they have a series of 3watt l.e.d.s in five colours soldered to aluminium star-shaped heatsinks (they do get hot) While they have a regular r/c plug on them, do not plug them into your receiver as they might be damaged and may damage your receiver too by drawing too much current. I'm using four of these at the moment bolted to the legs of my Discovery Quad. I didn't bother with resistors/forward voltages or anything like that, I just connected them in series across my 4S Lipo so they get about 4V each? They are operated by a remote R/C switch since I do not need them on all the time and they do draw down some power. (~1.5A). I'm probably over-running them but at $0.99 each it's not a high price to pay. I have some spares on order in any case. They show up fine in the brightest sunshine; the flick of a switch tells me which way the quad is pointing. I have red, orange, green and blue l.e.d.s. An alternative could be a ultra-bright strobing cannibalised cycle torch of course. |
|
|
QUANUM
(ELECTRONIC 'FUEL GAUGE') Apart from orientation the other significant worry for quad fliers is battery life. Now, you can simply do this by working out our your likely battery consumption and stopping short to leave enough capacity in reserve for a 'return home'. While this method works, how nice would it be to have a fuel gauge so to speak. The stand-alone Quanum Telemetry unit operates on 2.4GHz with a frequency hopping system which doesn't interfere with my Multiplex 3030 2.4GHz radio. Now then, there is no need for a complete TV/telemetry system or a new telemetry enabled radio and receiver, the Quanum is an independent add-on battery capacity monitor and it's available from HobbyKing.com $50. The basic unit measures cell voltages but an add-on current and thermometer ($20) measures temperature and current and therefore more importantly LiPo capacity. It has configurable bleep alarms too! for cell/battery voltages and capacity consumed/remaining. Great item with a range of more than 1km. My quad takes just over 15A on hover from a 4S Zippy Compact 3700mAhr LiPo pack. This equates to flight times of about 11mins 45secs. This rather depends on circumstances and flying technique of course but I can reckon on 10 min flight times safe in the knowledge that I can virtually see my 'fuel' (I don't take the readings as absolute, these readings are indicators for me.) |
|
 LATEST ITERATION
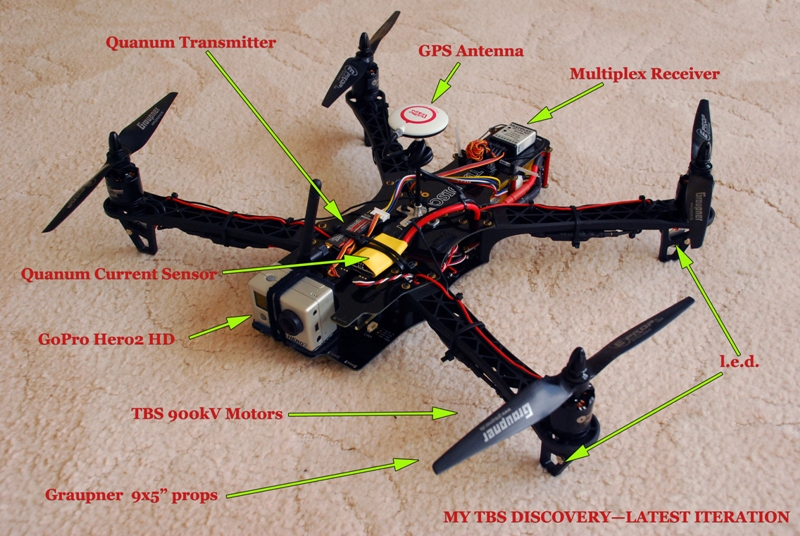
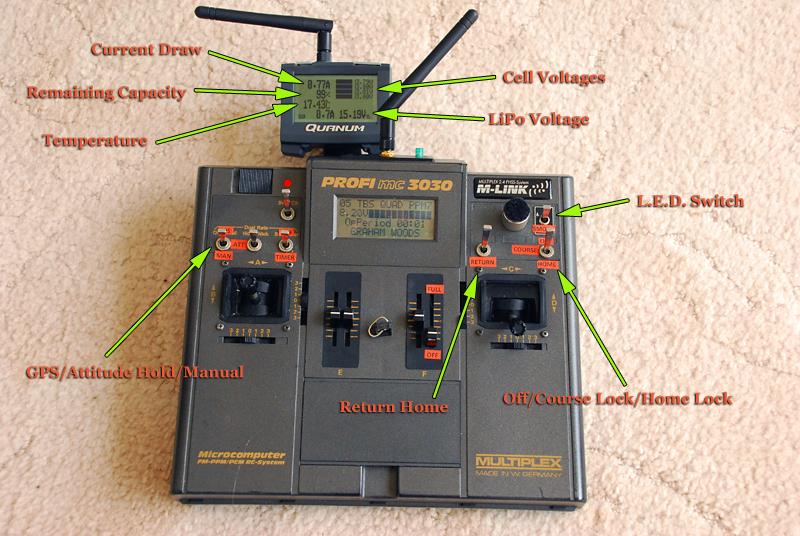
Here are a couple of images of my quadcopter system as it stands now; it may change of course. The first shows my transmitter with the attached Quanum telemetry unit.
I think the image is self-explanatory. I mounted it with Velcro on a Fr-Sky holder - same fitting. I may try using small Neodymium magnets instead though.
This telemetry system of course can be used on any model that uses up to 6 Lipo cells to monitor battery consumption. I labelled my transmitter switches in case you wondered what all those orange labels are for (and so I don't forget!) |
|
|
My second image shows my quad. It weighs just over 1.3kg (and it doesn't glide btw). I use TBS labelled 900kV motors which I believe are in fact T-motors. I'm using a Zippy Compact 3.7AHr 4S battery pack. I did use a Turnigy Nano-tech 3.3AHr 4S pack. All the 7 channels of Multiplex receiver are being used. I've got (the well balanced out of the box) Graupner 9"x5" props which seem to be excellent. A couple of other things... the temperature sensor is mounted on the LiPo, I can't see the point of it but I used it nevertheless. I have 4 x 3watt l.e.d.s on the bottom of the legs operated by an r/c switch for orientation purposes which you can just make out - they face rearwards. My GoPro is mounted on black Sorbothane and the very sticky blue Moongel. A girl's scrunchie hold the camera in place. |
|

 My simple setup is shown here
and it kind of works. I use an iPad
because I do not have a Smartphone. I have no servo tester so I just
use a regular Tx/Rx, I'm using a Spektrum DX6i here. Virtually any ESC will do since your current
draw is low. You can use a tacho to get each motor spinning at the
same speed for each test or just use full throttle.
My simple setup is shown here
and it kind of works. I use an iPad
because I do not have a Smartphone. I have no servo tester so I just
use a regular Tx/Rx, I'm using a Spektrum DX6i here. Virtually any ESC will do since your current
draw is low. You can use a tacho to get each motor spinning at the
same speed for each test or just use full throttle. 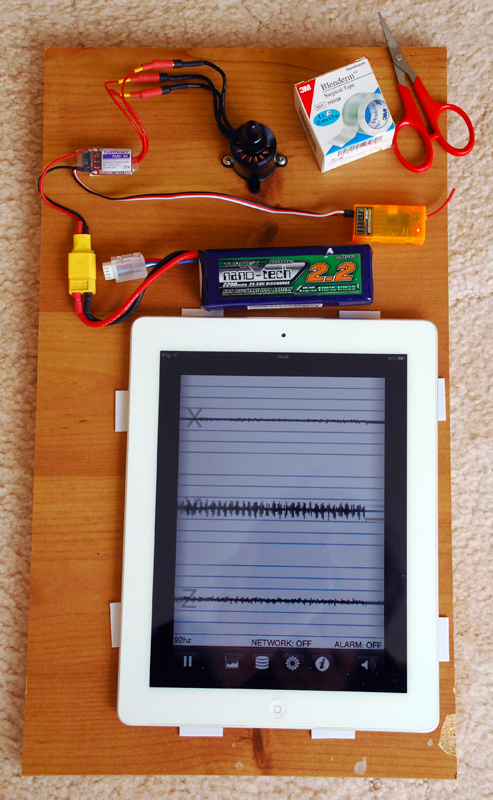
 ORIENTATION
ORIENTATION.jpg)